Chronicling my Long EZ construction (and a few other things).
Disclaimer
This blog is for entertainment purposes only, and is not meant to teach you how to build anything. The author is not responsible for any accident, injury, or loss that occurs as a result of reading this blog. Read this blog at your own risk.
Most of you probably won’t remember JT’s original instrument panel, so let me show it to you one more time. Pay particular attention to the right side. The square panel you see is an LCD (Liquid Crystal Display)engine monitor.
A pretty good looking VFR panel from before the EFIS revolution
An LCD engine monitor like this was very impressive by 90's standards.
Everything you ever wanted to know about your engine in a small footprint
Gone was the heft of multiple dial gauges that took up so much panel space, and gone was also the thick bundle of wires behind it. Everything replaced by a small flat screen with more information on it than a typical panel full of dials, and a thin ribbon cable that ran the length of the fuselage to the main Data Processing Unit.
Back side of the super thin LCD display
Ribbon cable bringing data to the display
The not so light brains of the system. Sensors' inputs come in, and data for the display goes out.
From there shorter wire-runs connected it to the multiple sensors in the engine compartment.
EGT and CHT wires penetrating the firewall
Engine sensors' bundle (oil press & temp, fuel press & flow, RPM, volts & amps), and few others.
Engine sensors' firewall penetration
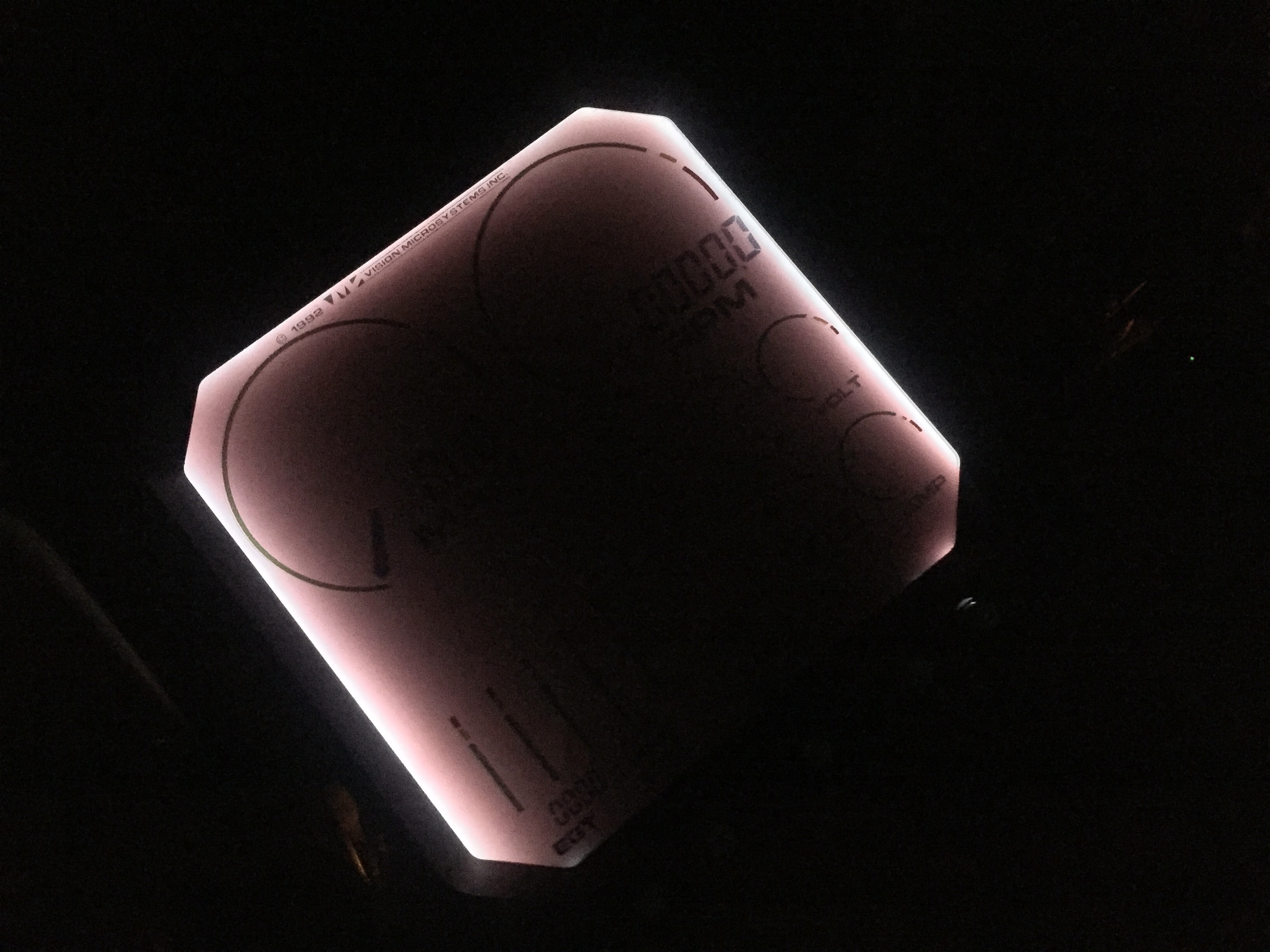
Thirty years later, support for the Vision MicroSystems 1000 was fading fast, and cannibalization of older units was the only way to maintain the few remaining ones still in use.
LCD background light started to go
Hard to fly in low light conditions with something like this
The fact that the screen was at times difficult to read under some lighting conditions, and that slow and methodical interpretation of CHTs and EGTs bar graphs was required, did not help its cause.
Can you glance at the engine instruments and tell the oil pressure?
How about #4's CHT, or #1's EGT? The value of each line of the bar graph depends on which mode one's in.
Without a doubt the writing had been on the wall for a long time, but what had stopped me from replacing the VM1000 was the invasiveness of the work in the engine compartment in order to upgrade away from this system. However, I did make a mental commitment to bring JT’s engine monitor to new millennium standards the first time the engine had to come off.
Enter the GRT Mini.
My CAD rendition of the new sub-panel
Back side of the proposed installation
There were quite a few benefits to this choice:
1. Brand, form factor, and software commonality with my PFD and MFD 2. Already know how to install and use the unit 3. Very thin, thus not requiring much space behind the panel 4. Ability to record parameter 5. Color display 6. Six user configurable pages 7. User configurable audio and visual alerts 8. Factory support 9. PFD backup 10.Economical
Couldn't install anything too thick here due to other items behind the panel
It was really an easy choice.
This time around I decided to save some money, and go with the Mini-X rather than the Mini-AP since this unit would not be connected to the autopilot. I did however connect it to a magnetometer (I had a spare one), to the pitot/static system (all it needed were two short hoses), and to an external GPS antenna (came with it).
Audio and visual alarms are standard on the Mini-X, but I craved a silly CHECK ENGINE lightthat would light up red in front of me anytime a parameter exceedance occurred.
I wanted an automotive styleCHECK ENGINE light for fun
I chose not to purchase the battery backup option at the time, but I now think that was a mistake. I have run the main battery low a few times, and had to start the engine with the engine monitor unpowered. I did not like this, and I will send the unit back to GRT to have an internal battery installed this winter.
But let’s get back to the physical installation...
As you might have expected, I decided to put the new unit right where the old one was since there was already a nice big hole there, but I had to come up with a new sub panel design to capture the Mini-X, and a few other items I wanted to colocate.
The making of the Engine Monitor sub-panel
I tried a few configurations...
... and eventually settled on one that reused the previous screw holes and nut-plates
Testing for fit
Added a spare CB and USB data ports to check for interference behind the panel
Testing with the Mini-X for fit in the panel and behind it
The low profile USB thumb-drives (far right) barely clear the Stratus front face. Perfect.
Disregard the Fuel Vent Icing light. That is for a future experiment I have in mind.
Bottom USB thumb-drive (only one in the pic) is used to update/record engine parameters
The GRT Mini has six configurable pages, but at this stage I wasn’t quite sure which one I would use the most.
Turned out this is the page I would be on most of the time
Never used this one
Might have looked at this one once or twice
This page allows you to add more bar graphs to the right. I just don't need any more.
This is a very interesting page that I pull up in flight sometime to geek out on data
I did pick the two bottom gauges, but didn't find this page very compelling.
Time to wire this thing up...
This is my latest configuration. Works well but could change in the future.
Because I wanted to make the engine easier to remove in the future (hopefully a distant one), I reduced the high number of firewall penetrations to four.
Firewall penetrations with no quick disconnects makes engineremoval more difficult
All the new sensors' wires, including the alternator field wire, would go through a 28 pin bulkhead cannon plug.
28 wires, 1 quick connector. Perfect!
Hell hole side of the quick disconnect wired up
Back shell of the connector (Hell hole side)
Quick connect plug finished
Engine side of quick disconnect plug
All engine sensors (and a few more wires) wired to the quick disconnect
"It don't get any easier than that!"
I don't expect my choice of a plastic connector in the engine compartment to be universally applauded. Yes, it might melt quickly in case of a fire, but one has to ask himself how much of a problem that would be. I'd loose all engine data and the alternator, not good, but not as bad as the fire still burning back there.
More importantly, lacking any other type of alarm able to tell whether a fire has developed in the engine compartment, losing all engine instruments in quick succession due to a melting connector might as well be one's first and only warning of a disaster in the making.
"Time to land immediately? Damn right it is!"
Using a fireproof metal connector instead, without the addition of a fire detection device, would practically guarantee that the first indication of a fire would be a melted spar and a hole in the ground.
You could think of the plastic connector as the sacrificial lamb, or the canary in the mine, something whose threshold of damage is lower, and can warn you of impending doom.
The rest of the wires (2 electronic ignition primary shielded wires, 2 Hall effect sensor shielded orange wires, and 1 left magneto switch shielded wire), plus one manifold pressure line for the electronic ignition box, were routed to the turtle-deck (behind the passenger’s head) reusing an existing firewall passage.
I didn't want to run shielded wires through an unshielded connector
The starter contactor was relocated from the firewall to the nose, and its #2 AWG cable (originally coming from the battery contactor up front) repurposed as an intermediate starter cable (up to a firewall disconnect). A flexible #4 AWG welding cable was also installed in the fuselage as the new alternator cable, and connected to the battery contactor in the nose, and to a bulkhead pass through at the firewall.
Relocating and testing JT's Starter Solenoid
JT's new high level wiring diagram (subject to change)
Had to cut this old Starter Contactor cable to remove the firewall
Silicone boots protect the terminals on Battery and Starter Contactors (now in the nose)
Every one of JT's relays are now concentrated on the left side of the nose
The additional #4 AWG welding cable added a little weight, but improved maintainability.
The firewall connectors had to be slightly modified by countersinking the mounting holes. I wanted to make sure the starter and alternator cable ends would not be able to come in contact with the bolt heads, regardless of the clocking of the cables on their posts.
Original #2 AWG starter contactor cable had to be cut to pull it though the firewall
Old cable would be reused as the intermediate starter cable up to the firewall-disconnect point
Old hole had to be enlarged slightly to accept the new terminal
Counter-boring the bulkhead connector's mounting holes
Making sure diameter is big enough for tools to fit
In case you wondered what happens if a crimp comes loose. Yes, this is JT. 😬
I discovered the 0 Amps reading before takeoff and returned to investigate.
That was six years ago. This new crimp isn't going anywhere.
Original #2 AWG cable shortened and connected inside the Hell hole
At this point the only GRT component left to install was the Remote EIS computer and its wiring. This black box is an item that doesn't require maintenance after installation, so I chose to hide it behind the passenger seat, accessible... with a little effort.
The brains of GRT's EIS
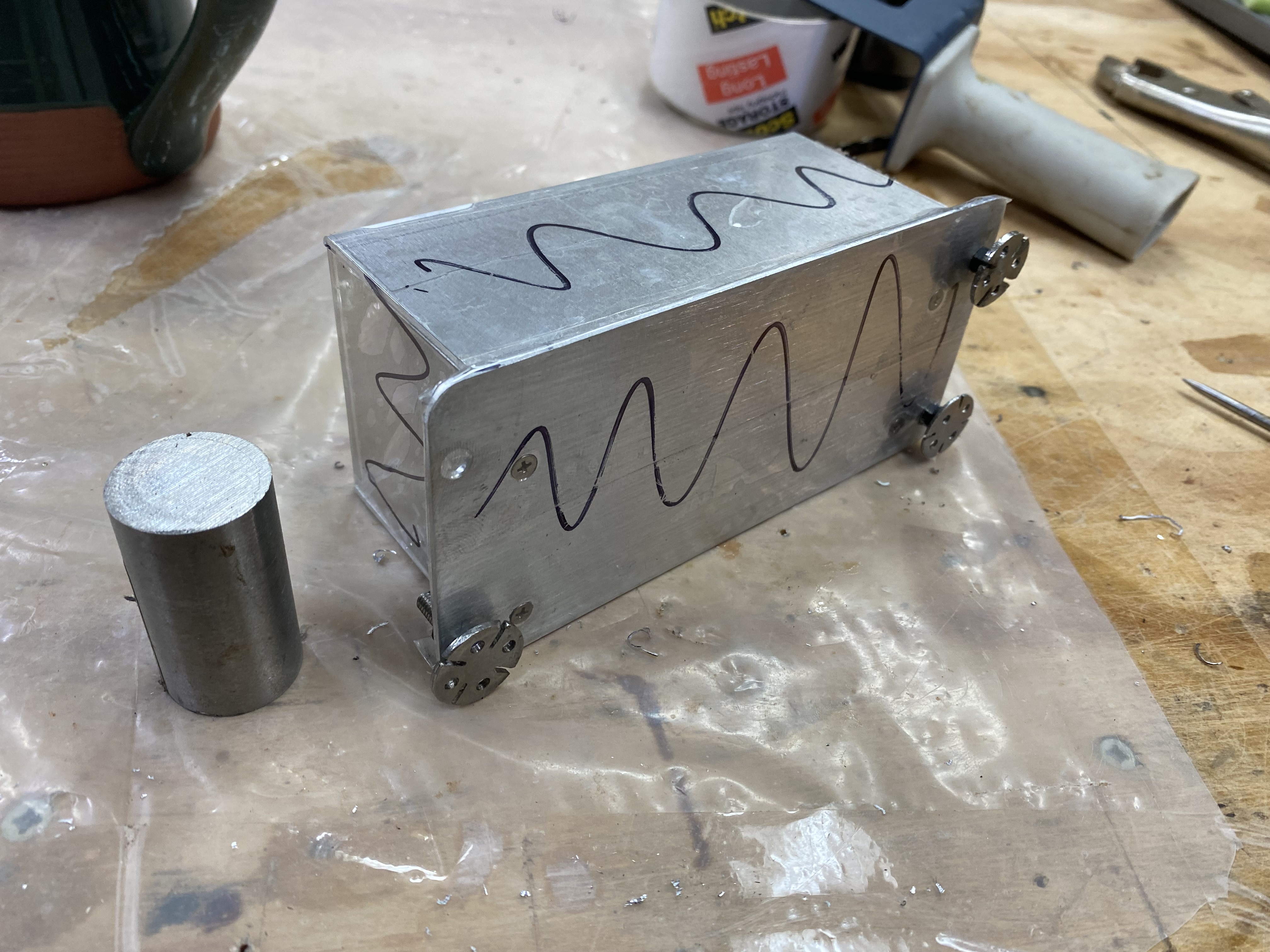
Click-bonds machined out of stainless (left). Clear tape (marked) to avoid contact with flox.
Rear of passenger back seat sanded to accept click-bonds
Click-bonds mounted and flox added
Foam pushing on EIS box while flox cures overnight
Next day the EIS box is firmly attached to the back of the passenger seat
Stainless click-bonds embedded in flox after EIS box removal
Sensors' wire bundle from cannon plug to EIS
Lots of wires require careful organization
CHT/EGT D-sub (left), other sensors D-sub (right), and MAP hose (blue).
While wiring the Remote EIS, I was taken aback by the amount of ground connections that had to be made. Pretty much every engine sensor needed one, so I installed a ground bus in the Hell hole connected to the engine grounding bolt.
Engine's ground strap connects here
A Hell hole view of the engine ground
Engine ground cable was reused
A grounding bus was added to the engine ground cable in the Hell hole
Ground cable attached to the bus. Bolt will protrude through the firewall for engine to connect to.
New ground bus and old ground cable (white) installed in Hell hole
New firewall connection for engine grounding strap
Ground bus in use
With the grounding situation dealt with, let’s take a look at the new panel.
Man! That looks mean... in a good way 😁
GRT Minis in their default screens
Triple redundancy airliner style 👏🏼👏🏼
Night cockpit in white (fully dimmable)
Night cockpit in red (also fully dimmable)
Don’t know about you, but I love this panel!
The only IFR panel I like better than JT's is BizMan's (aka Michael Beasley, COBA's magazine editor), which I had a very very small part in helping to plan.
Back to JT, I only installed one sensor in its Hell hole, the Hall Effect electrical current sensor, which unfortunately didn’t work right off the bat. Took a little while before I realized that GRT had published an updated wiring diagram for it on their website, and that mine was missing a resistor. After adding the resistor the current indicator on the Mini-X started working correctly.
Electrical current sensor (wrapped in red silicone tape)
301Ω resistor on a quick connect
Same thing, back side.
Resistor installed
Resistor buried in silicone tape
Another issue that cropped up after powering the panel was that the heading indications were off by 20º to 60º 😬. Unfortunately this issue remained unrecognized until first flight of the new FAA Phase 1, and even then it didn't create any issues during that short test flight (my HSI is always on Track mode, per Boeing practice).
Turned out this issue was due to the amount of metal I added under the right side of the thigh support.
Two magnetometers (left) can no longer sense correctly due to the fuel pump proximity (right)
I did fix this issue before the second flight of course, but I will tell you that story another time.